Yilin Cai
Ph.D. Student in Robotics @ Georgia Tech, Poet, Roboticist

I am a Ph.D. student in Robotics at Georgia Institute of Technology, advised by Dr. Yue Chen. Before joining Georgia Tech, I received my master’s degree in Robotic Systems Development (MRSD) at the Robotic Institute, Carnegie Mellon University (CMU), where I worked in Biorobotics Lab with Prof. Howie Choset. I received my B.Eng. degree in Mechanical Engineering (Hsue-shen Tsien Honor Class) from Shanghai Jiao Tong University (SJTU) in 2020.
My research interest lies in general medical robots and robot manipulation. Particularly, I focus on surgical robot system design, modeling and planning for continuum robots, and robotic grippers for in-hand manipulation. I also study control and planning for autonomous driving and SLAM.
Additionally, I was fortunate to work with Profs. Kenneth Salisbury, Gregory Chirikjian and Zhinan Zhang before.
News
| Jan 27, 2025 | One paper accepted to ICRA 2025. |
|---|---|
| Jan 4, 2025 | Give a talk on elephant trunk intelligence at a symposium of SICB 2025 Anual Meeting at Atlanta. |
| Dec 19, 2024 | One paper on Modular Self-Reconfigurable Continuum Robot accepted to RA-L. |
| Jun 30, 2024 | One paper accepted to IROS 2024. |
| Jun 3, 2024 | Present my work at PlanRobo Workshop at ICAPS 2024. |
| May 30, 2023 | I presented my papers at ICRA 2023, London (Talk) and won the Outstanding Manipulation Paper Award. |
| Jan 31, 2023 | The paper on statics modeling of medical snake was accepted to ISMR 2023. |
| Jan 27, 2023 | Our master’s project on autonomous Zamboni was highlighted by CMU News. |
| Jan 17, 2023 | Two papers, “Adaptive Robot Hand with Active Surfaces” and “DytanVO” were accepted to ICRA 2023. |
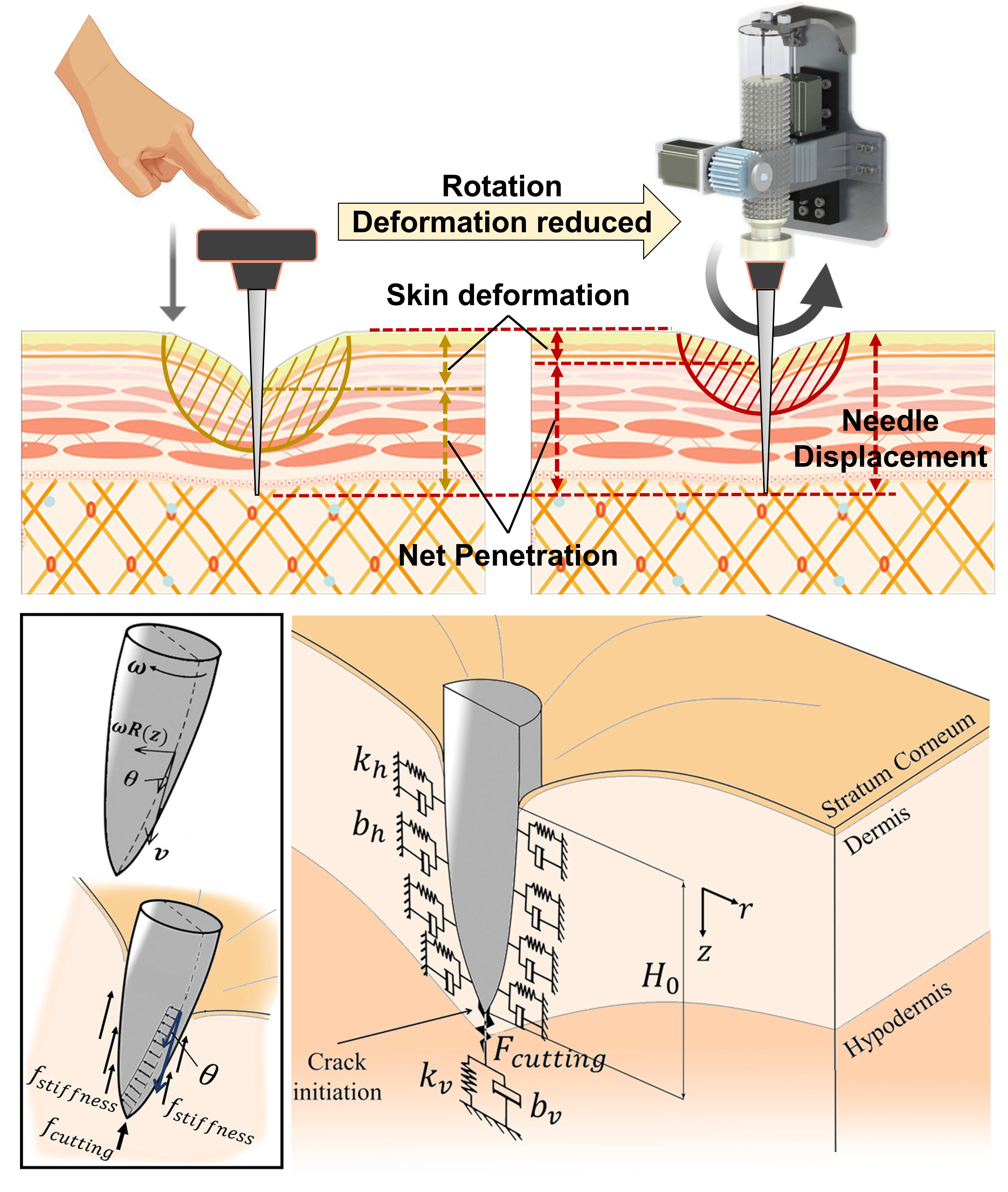
| Mar 7, 2022 | My bachalor thesis on Rotating Microneedles was published in Research (Science Partner Journal, IF=11.036). |
| Aug 30, 2021 | Finished my intern at Ronovo Surgical. Started my journey at CMU RI. |
Selected Publications
-
 Opt2skill: Imitating dynamically-feasible whole-body trajectories for versatile humanoid loco-manipulationarXiv preprint arXiv:2409.20514 2025
Opt2skill: Imitating dynamically-feasible whole-body trajectories for versatile humanoid loco-manipulationarXiv preprint arXiv:2409.20514 2025 -
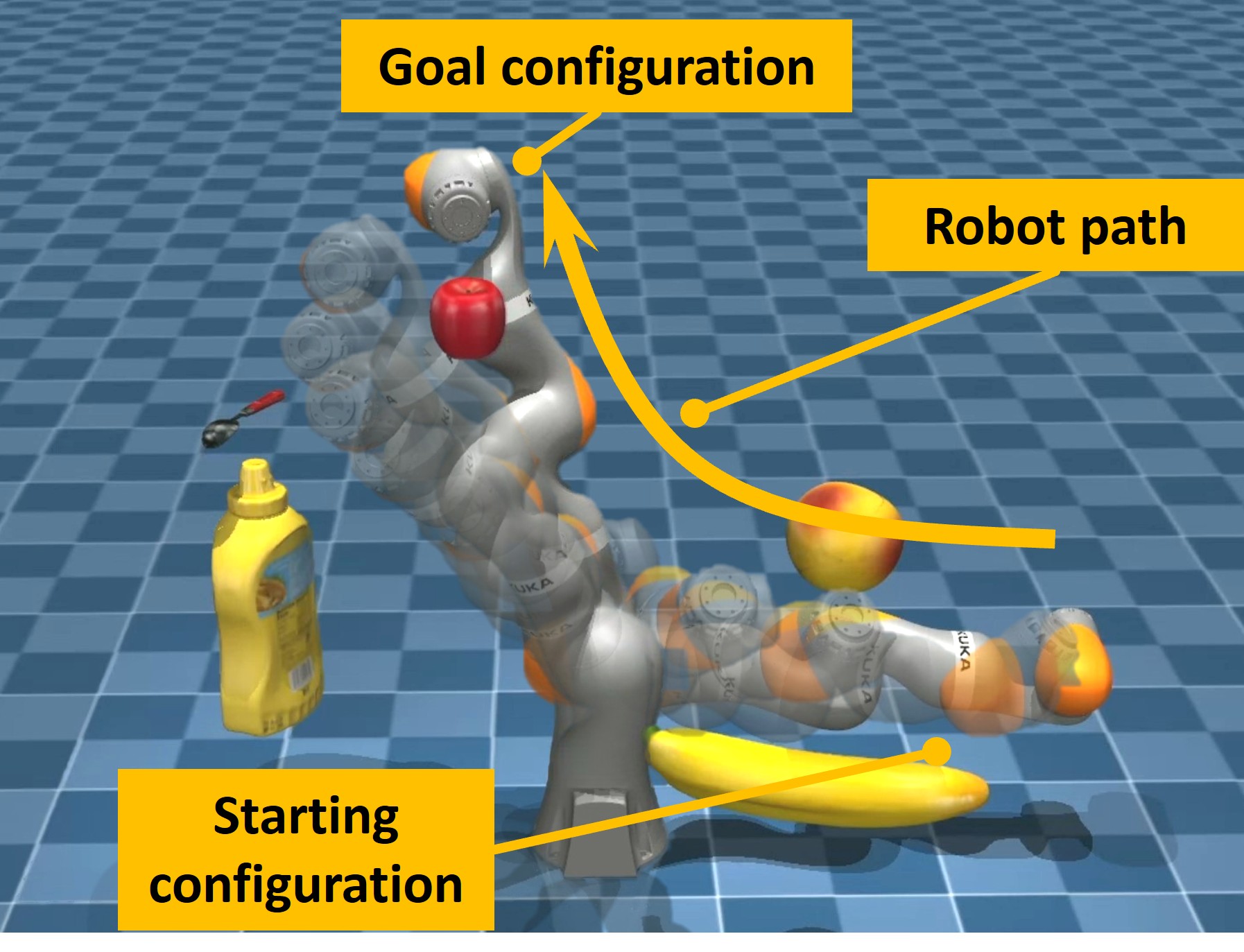 Propagative Distance Optimization for Motion PlanningInternational Conference on Robotics and Automationv (ICRA) 2025
Propagative Distance Optimization for Motion PlanningInternational Conference on Robotics and Automationv (ICRA) 2025 -
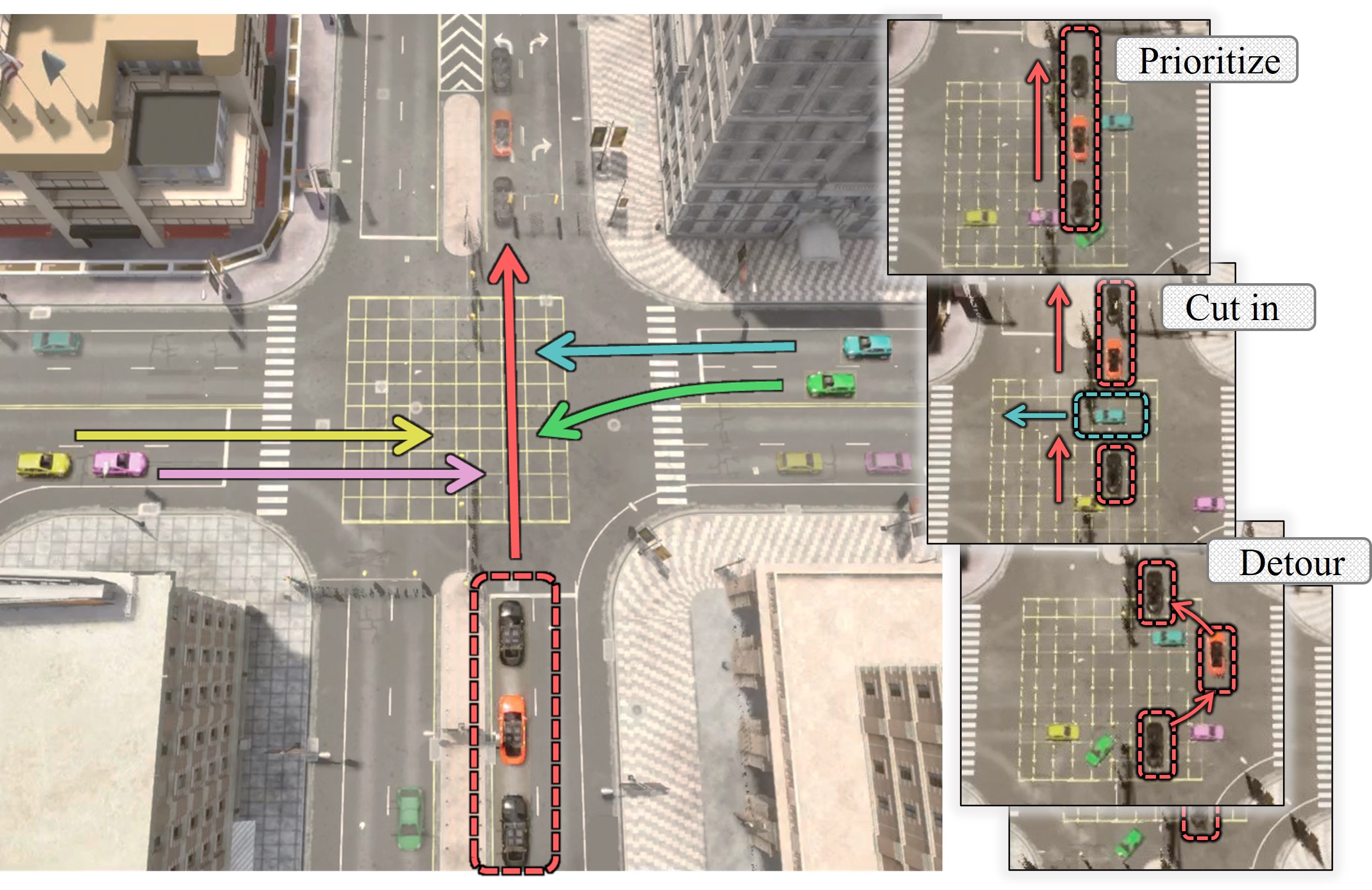 Multi-Agent Teamwise Cooperative Path Finding and Traffic Intersection CoordinationIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024
Multi-Agent Teamwise Cooperative Path Finding and Traffic Intersection CoordinationIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024 -
 Propagative Distance Optimization for Constrained Inverse KinematicsInternational Workshop on the Algorithmic Foundations of Robotics (WAFR) 2024
Propagative Distance Optimization for Constrained Inverse KinematicsInternational Workshop on the Algorithmic Foundations of Robotics (WAFR) 2024 -
 Statics Modeling of Discrete Joint Surgical Probes with Tendon-based StiffeningInternational Symposium on Medical Robotics (ISMR) 2023
Statics Modeling of Discrete Joint Surgical Probes with Tendon-based StiffeningInternational Symposium on Medical Robotics (ISMR) 2023