Robot Design
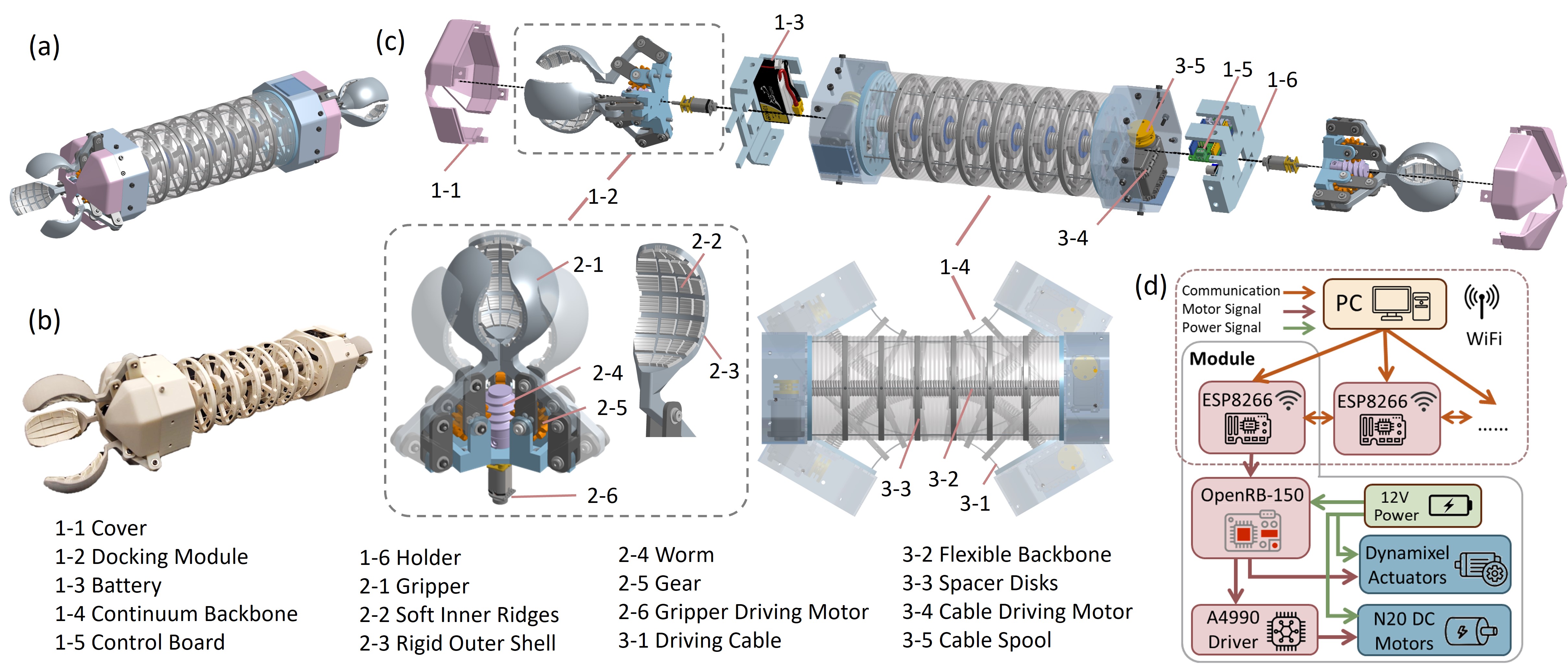
The MSRCR system features two key components: a soft continuum backbone and two docking connectors based on hybrid soft-rigid ball gripper. The design goals of the MSRCR system are to (1) provide high motion dexterity for single module, (2) achieve polygamous omnidirectional docking, and thus to (3) enable both locomotion and manipulation capability for single module. To meet these goals, the tendon-driven continuum module provides 2-DoF bending for compliant locomotion while the ball grippers allow both the connection between multiple modules and object manipulation.